Velocity despiking
Any measured signal may be contaminated by spikes. These spikes are typically short-lived and transient, which result in sudden change in the measured velocities. These spikes must be removed because they can alter quite dramatically the velocity spectra, which is then used for fitting inertial subrange model.
Overview
Spikes in velocities measured by acoustic-Doppler velocimeters can result from aliasing of the Doppler signal, in particular when pulses become contaminated by reflecting from complex objects and boundaries [1]. Several techniques exist for despiking:
- Phase-space thresholding applied to acoustic-Doppler velocimeters [1]
- Filter-based despiking methods such as those used in atmospheric turbulence studies [2]. The subgroup is investigating in particular the median filter despiking technique [3].
-
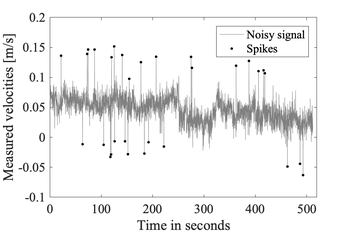
Example velocities measured by an acoustic-Doppler velocimeters -
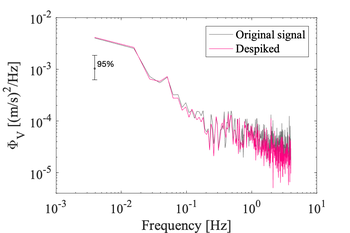
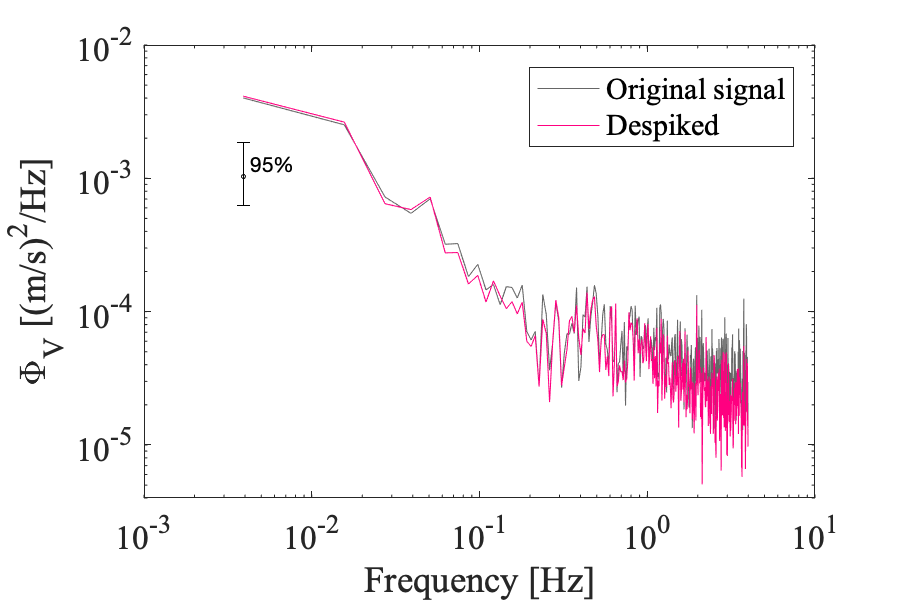
Example velocity spectra before and after removing spikes. The variance of the despiked signal has reduced by 12% even though there were 30 spikes


Filter based methods
This category of methods is quite common in the literature and has been reviewed extensively by others [1][2]. These methods compare the original signal against a smoothed version, and values exceeding a threshold are deemed spikes. Most commonly, the threshold is applied to the time series of velocity differences obtained by subtracting the smoothed velocities from the original spiky signal.

Filter choice
In the 1970s, scientists developed methods based on nonlinear median filters [4]. These filters are less biased by spikes than other linear operations such as low-pass Butterworth filters[2]. The moving median filter, for example, only requires a window length, i.e, the number of points over which to calculate the median. This window length must be longer than the duration of spikes, which can span consecutive samples. This number must also be sufficiently short to compute a reasonable local median (see Table 1 of Starkenburg et al 2016[2]). The challenge then becomes determining the threshold for identifying spikes.
Identifying the threshold
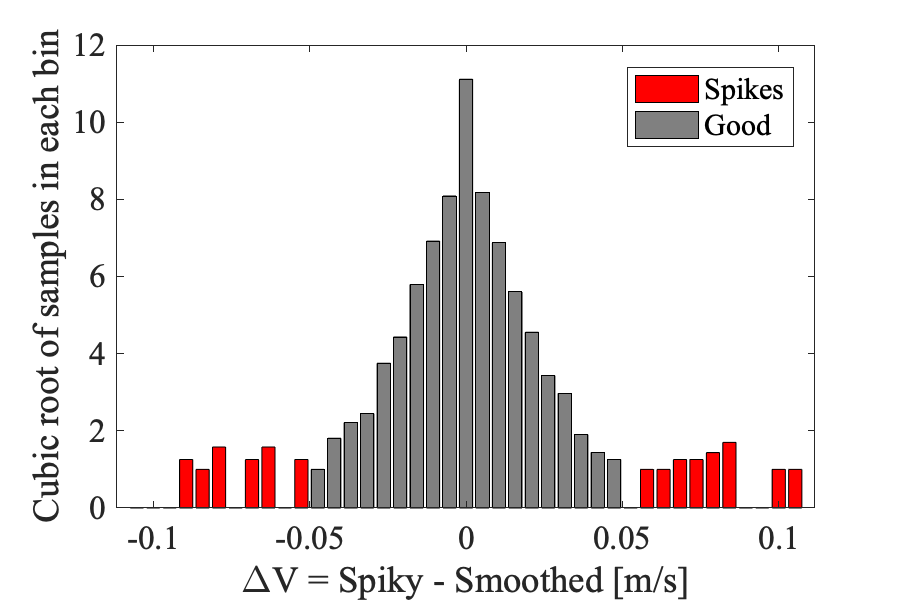
Some filter-based methods use thresholds based on a factor of the original time series' standard deviation (e.g., Tukey method discussed by Goring & Nikora[1]). The results of the analysis then become sensitive to this choice of factor. A more automated means to identify the threshold was proposed by Brock (1986)[3] using a histogram of velocity differences (the original minus the smoothed signal). The local minimums on either side from the center define the positive and negative thresholds. Velocity differences exceeding these thresholds are deemed to be spikes.

Phase-space thresholding methods
The methods of Goring and Nikora[1] was developed specifically for acoustic-doppler velocity measurements. The other papers referenced above include methods for turbulence measurements for other systems such as eddy-correlation. The JTECH paper by Starkenburg et al. (2016)[2] review a number of methods, including those of Goring and Nikora. Starkenburg et al. (2016) deemed median-based filtering a more robust means of filtering data since it can handle missing points more easily, and handles better time series with evidence of low-frequency coherent turbulent structures.
Notes
- ↑ 1.0 1.1 1.2 1.3 1.4 D. G. Goring and V.I. Nikora. 2002. Despiking Acoustic Doppler Velocimeter Data. Journal of Hydraulic Engineering. doi:10.1061/ASCE0733-94292002128:1117
- ↑ 2.0 2.1 2.2 2.3 2.4 D. Starkenburg, S. Metzger, G.J. Fochesatto, J.G Alfieri, R. Gens, A. Prakash and J. Cristobal. 2016. Assessment of Despiking Methods for Turbulence Data in Micrometeorology. J. Atmos. Oceanic Technoly. doi:10.1175/JTECH-D-15-0154.1
- ↑ 3.0 3.1 F.V. Brock. 1986. A nonlinear filter to remove impulse noise from meteorological data. J. Atmos. Oceanic Technoly. doi:10.1175/1520-0426(1986)003,0051:ANFTRI.2.0.CO;2
- ↑ A.E. Beaton, J.W. Tukey. 1974. The fitting of power series, meaning polynomials, illustrated on band-spectroscopic data. Technometrics. doi:10.1080/00401706.1974.10489171


{kind=link}
{kind=link}
{kind=link}
{kind=link}